Program
Competitions
We participate in the RoboCup Junior competition at the regional, state, national, and international level.
Soccer
Students build two robots to compete in a fully autonomous game of robot soccer against an opposing pair of robots. As the robots are autonomous they need to employ a variety of sensors to find the ball, point in the right direction, and stay inside the playing area. These robots use a ball that either emits infrared light, or is bright orange in colour, depending on the division.
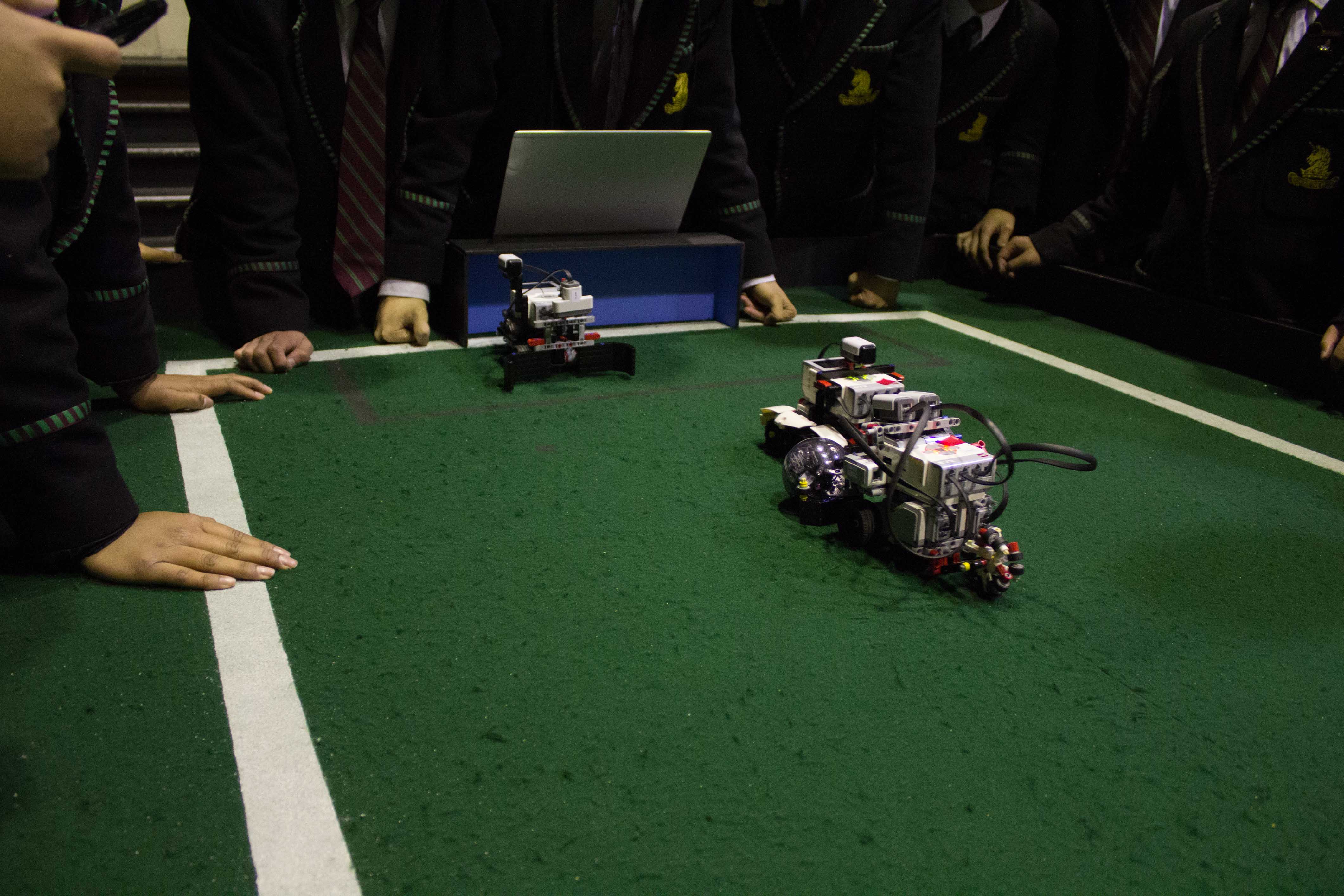
We compete in standard and open soccer. Learn more about these competitions on the on the RoboCup Soccer page.
Rescue
Robots compete by following a winding line on a series of tiles to a designated rescue area. On the way the robot could encounter obstacles, bridges and short cut opportunities that will challenge the most intrepid programmer. After negotiating the randomly selected path, the robot arrives at a green coloured area which indicates a chemical spill. While the clock is still ticking the robot must find “the victim” before pushing them out of the quicksand to safety.
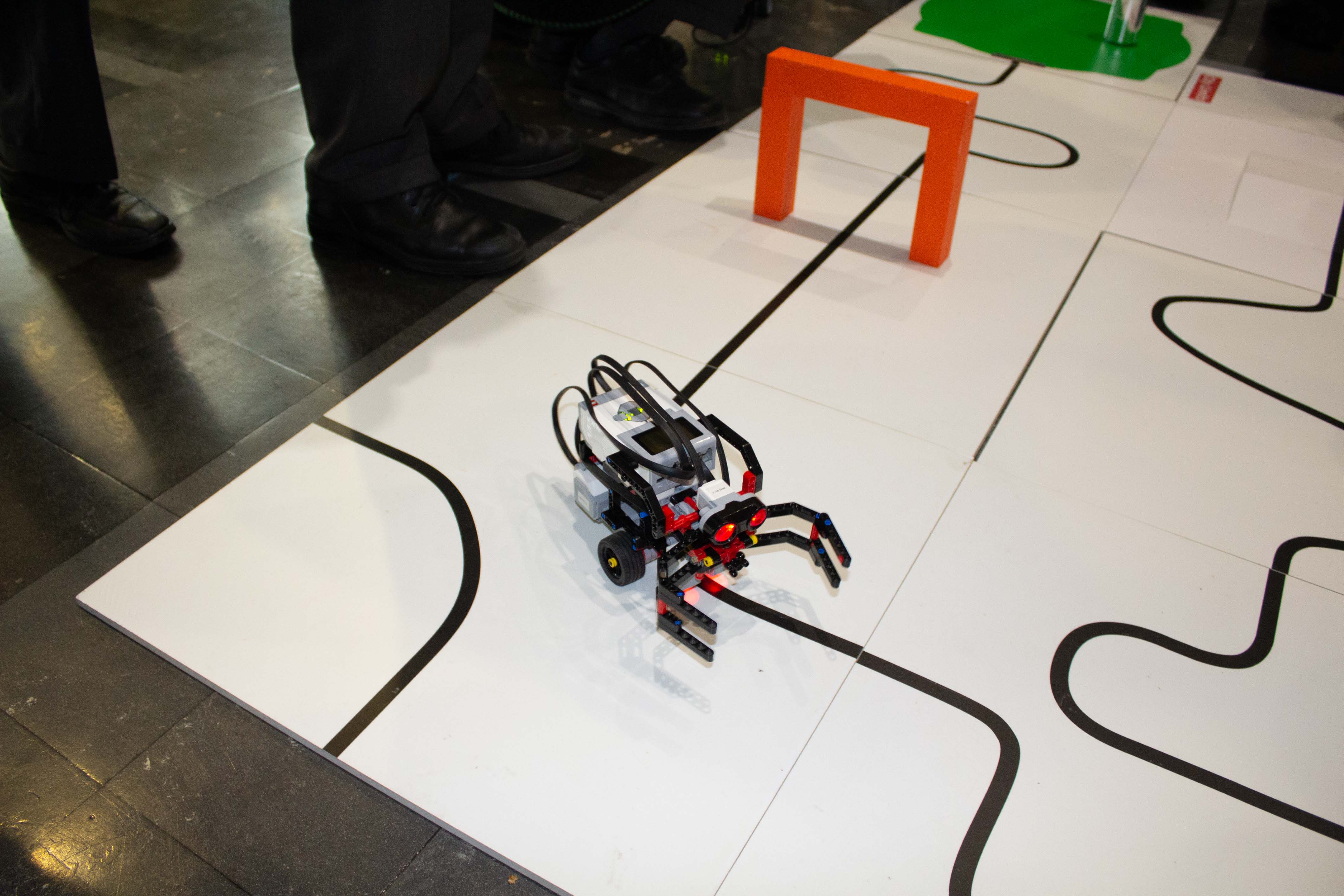
We compete in secondary and open rescue. Learn more about these competitions on the on the RoboCup Rescue page.
Our Curriculum
Year 9
Year 9 students first learn to design and build robots using the Lego EV3 platform by participating in the MHS Sumo competition. This competition, run in term 1 each year for year 9 students provides the perfect introduction to robotics, regardless of their prior experience.
Throughout the remainder of the year students learn Python and program robots using ev3dev2. They form teams and build and program robots for their chosen competition.
Year 10
Year 10 students build on their knowledge from year 9 and improve their robots to enter the RoboCup Junior competition. For new members we run a crash course in term 1 so no one is left behind.
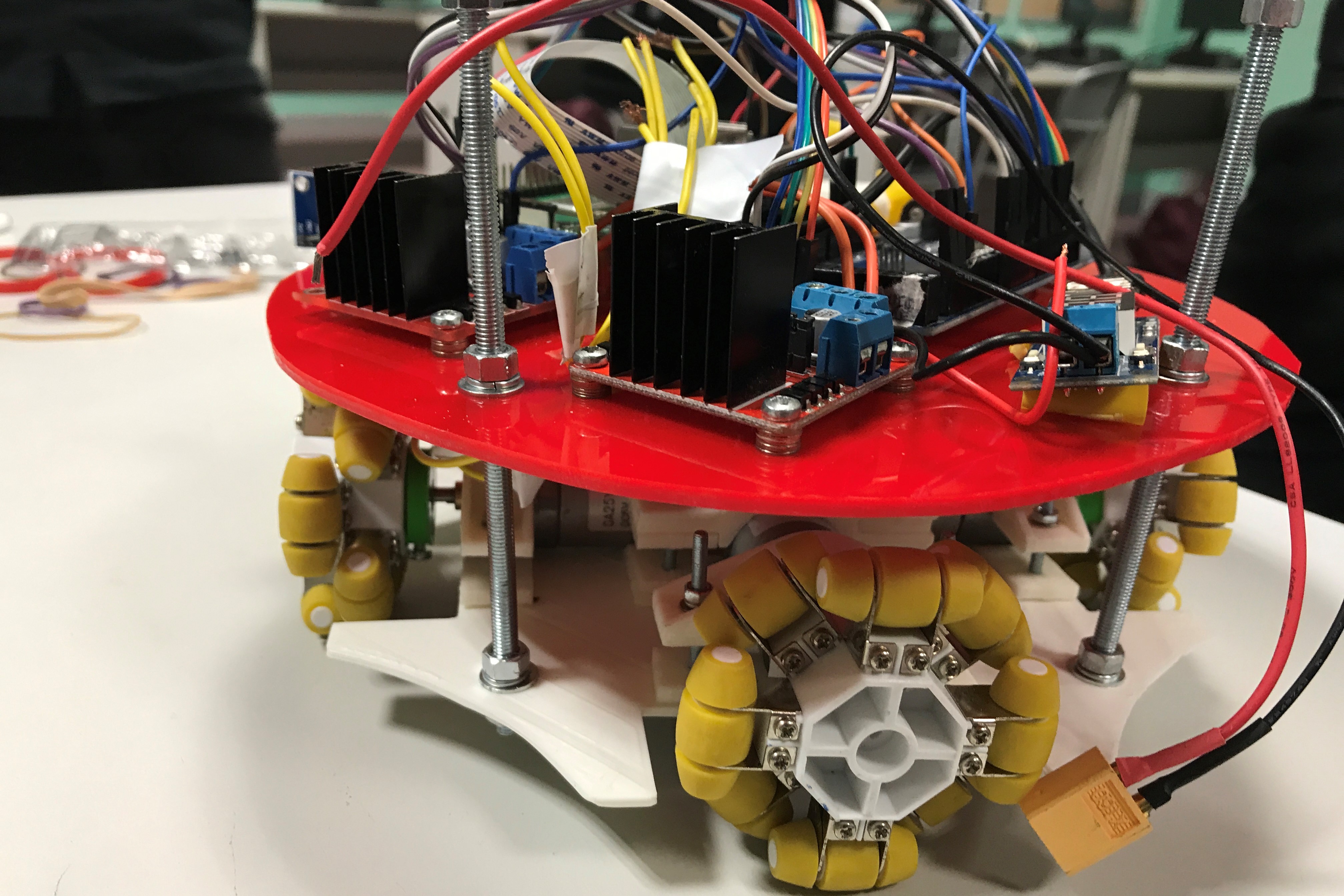
Year 11 & 12
Year 11 and 12 students build robots for the open rescue and soccer divisions, using 3D printed parts, Arduino and computer vision. Term 1 focuses on teaching the CAD skills that students need to design and then print their robot chassis and parts. Students then learn to wire up and program their robots using Arduinos. Depending on the competition, students may choose to use computer vision with either a Pixy2 or OpenCV on a Raspberry Pi.